




Control of the Multi-Legged Robots on Planar, Unstable and Vibrating Ground
Dariusz Grzelczyk* and Jan Awrejcewicz
Department of Automation, Biomechanics and Mechatronics Lodz University of Technology, Poland
Submission:April 17, 2019; Published:May 14, 2019
*Corresponding author: Department of Automation, Biomechanics and Mechatronics Lodz University of Technology, Poland
How to cite this article: Dariusz Grzelczyk, Jan Awrejcewicz. Control of the Multi-Legged Robots on Planar, Unstable and Vibrating Ground. Robot Autom Eng J. 2019; 4(3): 555638. DOI: 10.19080/RAEJ.2019.04.555638
Abstract
In this paper, we developed and investigated numerically a general kinematic model of a multi-legged hybrid robot equipped with a crab-like and/or mammal-like legs. To drive the robot’s limbs, a novel generator of gait was employed and tested. The simulation model developed in Mathematica is suitable for virtual study and visualization of the locomotion process. In contrast to our previous studies, in this paper we focused only on precise control the position of the robot during walking in different directions. We are able to simultaneous control all six spatial degrees-of-freedom of the robot’s body (three deviations and three rotations along and around three different axes, respectively), as well as all robot’s legs. As a result, the investigated robot can be considered and used as a fully controlled walking Stewart platform. What is more, the used algorithm can also be successfully employed to coordination and control all limbs of the robot on unstable or vibrating ground. As an example, the control algorithm can be used to stabilize spatial position of the robot when the supporting ground becomes vibrating or unstable, and it will keep the robot stable and prevent it from falling over. Since the recent versions of Mathematica allows to communicate with different microcontrollers such as Arduino Uno or Raspberry Pi, the developed simulation algorithms can be relatively simply adopted to control real constructions of different multi-legged robots.
Introduction
Recently, different kinds of multi-legged robots are extensively investigated in the literature, since they have great importance in engineering applications [1]. Namely, when the limbs of the robot are controlled with a degree of autonomy, it can move within its environment and perform the planned tasks [2]. For instance, the legged machines are able to reproduce animals or humans’ movements and substitute humans in various activities [3]. Among numerous multi-legged robots met in the literature, we can distinguish especially robots with leg structure inspired based on the anatomy of insects or mammals. Large numbers of legs with different kinematic structures are useful to overcome complex obstacles met in nature without losing stability and increase stability of the robot.
The legged robots can perform their tasks in different terrains, however simultaneous coordination of all its legs are challenging in terms of control methods. Also, recently, various control strategies of the walking machines were usually tested by using different commercial software such as Matlab, Adams or Open Dynamic Engine [2,4-10]. It shows that investigations of walking robots are still challenging for researches and focus their attention. Therefore, in this paper we developed a general full parametric simulation model of a hybrid walking robot, i.e. the robot which can has different numbers of the legs inspired biologically by insects, reptiles or mammals. To drive the legs of the abovementioned robot, we employed central pattern generator, firstly introduced in our previous paper [11]. Moreover, we also used own algorithm, which is suitable for a smooth transition between different gait phases, i.e., initial, rhythmic and terminal phases [12]. Eventually, we considered the problem of controlling the direction of the movement of the robot and control all six spatial degrees-of-freedom of the robot’s body (three deviations and three rotations along and around three different axes, respectively), as well as control all robot’s legs on vibrating and unstable ground. These control possibilities can be especially helpful in a natural environment of the robot, when it comes to both the navigation, and obstacle avoidance.
Prototypes of Different Walking Robots
Advances computer modeling can be useful to increase the efficiency of designed machines, by introducing required modifications to the mechanical construction, depending on the results obtained during virtual tests. Currently, numerous computer programs such Catia, SimDesigner, Adams or SolidWorks software, support researchers in virtual prototyping of machines, including walking robots, for instance, see papers [13-15]. In our study we also designed different walking robots, with different numbers of limbs and their different structures. All our designs presented in Figure 1 were created in Inventor Professional 2019 software. In general, each robot consists of the main body part (trunk) and four (quadruped), six (hexapod) or eight (octopod) legs with crab-like or mammal-like structures. Following many previous researches, during modeling of all robot’s legs, we were inspired by the morphology of limbs of typical insects or mammals, reduced to three main segments [2,4,16-21]. To avoid mutual collisions between the legs, in all presented designs the robot’s legs are symmetrically distributed on two sides of the robot’s body. By adopting the initial positions of individual leg’s joints, different leg’s configurations, which correspond to configurations of lower limbs of different animals met in nature, can be implemented [7]. In all designs presented in Figure 1, each joint of the robot’s leg is actuated by Power HD AR-1201MG servomotor controlled by the pulse-width-modulation (PWM) technique. This servomotor has inner closed loop feedback of the position control and a proportional controller.

Both kinematic and dynamic models of crab-like or mammallike robots were detail presented in our previous papers [11,12,22]. On the contrary to the abovementioned references, in this study we focused only on novel mathematical formulations regarding full control of the robot on a planar, irregular, unstable or vibrating ground, which have not been presented before. To investigate the possibility of the robot’s control, we have developed a general, three-dimensional, fully parametric simulation model of a walking robot created in the Mathematica software. The created simulation model allowed us to visualize behavior of the investigated robot and control the correctness of the obtained results. Especially, we were able to control the spatial position of individual elements of the robot and well as the configurations of the legs. It also allowed us to better understand the obtained simulation results. Through the appropriate choosing of the parameters and configurations of the limbs, we are able to quickly generate various types of walking robots.
Kinematics of the Robot
In one of the recent papers we considered and investigated the problem of planning the trajectory of the robot body in the vertical direction, during walking on a planar plane in any (i.e. forward, lateral, oblique, etc) direction [11]. On the contrary to the mentioned paper, in this study we extended significantly the control possibility of the investigated robot, including full control of all six spatial degrees-of-freedom of the robot’s body (i.e. three deviations and three rotations along and around three different axes, respectively), as well as control all robot’s legs on planar, non-regular, unstable and vibrating ground. As it was mentioned before, this control possibility can be really helpful, when it comes to both the navigation, and obstacle avoidance in natural environment of the robot. As a result, the presented robot can be treated as a fully controlled walking Stewart platform. Figure 2 shows exemplary simulation model of a hybrid octopod robot. Four of its legs (two front and two hind) have mammal-like structures, whereas four middle legs have crab-like structures. In addition, for more general considerations, we used different initial configurations of the mammal-like legs for front and hind legs. Model of this hybrid octopod robot standing on a planar surface is presented in Figure 2.

The robot is embedded in a global coordinate system Oxyz. In addition, other local coordinate systems are fixed to the robot. The coordinate system O’x’y’z’, is associated with the center of the robot’s body. In turn, other local coordinate systems are associated with the robot’s legs. In Figure 2 we presented only one local coordinate system O”x”y”z” fixed to the leg L1. In general, we consider irregular and unstable ground, where a height (z- component) for the coordinates x and y for time t have the following general form
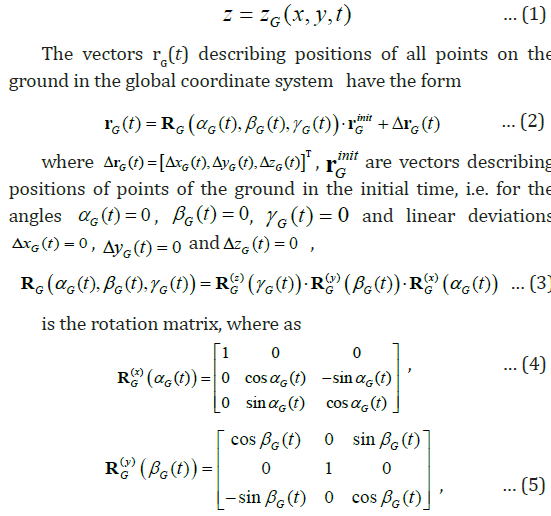

are elementary rotation matrices of the ground, respectively. All vectors rR(t) of the robot in the global coordinate system Oxyz is expressed by
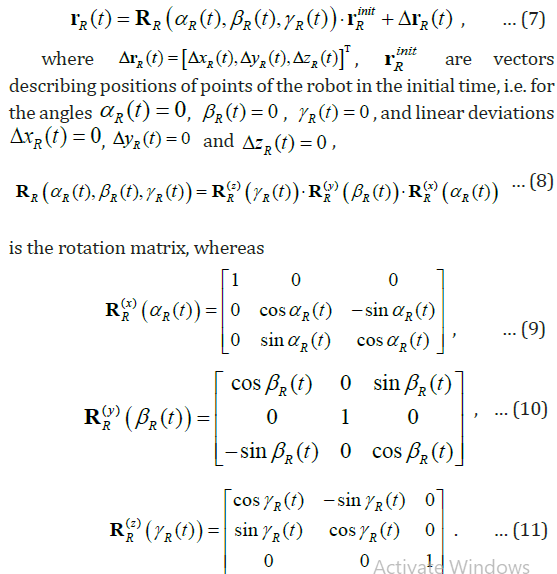
The determination of the coordinates describing the positions of the feet of all the robot’s legs requires consideration of the vectors rG(t) of the in contact points between the robot’s legs and the ground, as well as the inverse matrix 1 R R− . Next, the appropriate articulated variables for all joints of the robot’s legs can be determined.

Simulation Results
Control of the robot walking with tripod gait on a planar, stable and not vibrating surface
First, we considered the robot walking at oblique direction






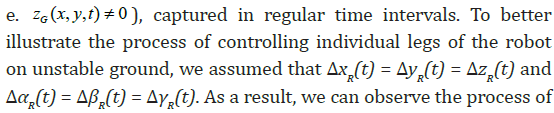
Control of the robot standing on not vibrating and unstable ground
In this subsection we considered the problem of control the robot on not vibrating, but unstable ground. Figure 5 presents configurations of the robot standing on unstable ground

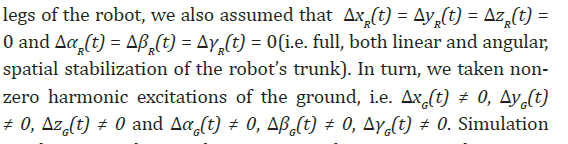
Control of the robot standing on stable and vibrating ground
In this subsection, we considered the control problem of the robot, which is standing on vibrating ground. As in previous subsection, to better illustrate the process of controlling individual


Application of the Developed Simulation Model
The proposed algorithm for controlling all robot’s legs during standing or walking for different cases was tested using a simulation model created in the Mathematica software. The possibilities of the Mathematica concerning 3D animation of simulated objects are available in the recent versions of this environment (in this paper we used Mathematica 11.2 version). Thanks to the developed visualization, we can observe exactly the configuration of all robot legs at any time, and this can be treated as a virtual experiment. The most recent versions of the Mathematica program also allow relatively simple operation of different microcontrollers connected to a computer such as Arduino Uno or Raspberry Pi. Moreover, simpler versions of Mathematica can also be installed in the internal memory of the mentioned Raspberry Pi microcontroller. As a result, using both the appropriate microcontroller and motor drivers, it is possible to directly apply the calculated articulated variables into all robot’s joints, in order to real verification of the proposed algorithms controlling individual limbs of the investigated robot. It is schematically shown in Figure 7. This task will be the goal of our further research related to the problem of control the robot’s legs, using real constructions made on the basis of the designs shown in Figure 1.

Conclusion
In this paper, a general model of a multi-legged robot has been developed and numerically investigated in Mathematica environment. The investigated robot was driven by a novel generator of gait proposed in our previous study. Using the developed simulation model, we performed some virtual experiments regarding locomotion process and stabilization of the position and orientation of the robot on unstable and vibrating ground. The presented results show that the presented control possibility can be employed for full control of the robot position and orientation in space, also during locomotion of the robot. As a result, the robot can be used as a fully control walking Steward platform. The most recent versions of Mathematica software allow to communicate with different microcontrollers, including Arduino Uno and Raspberry Pi. As a result, the developed simulation model can be relatively simply and successfully adopted to control the constructed prototypes of different kinds of multi-legged machines.
Acknowledgment
The work has been partially supported by the National Science Centre of Poland under the grant OPUS 9 no. 82015/17/B/ ST8/01700 for years 2016-2018.
References
- Agheli M, Qu L, Nestinger SS (2014) SHeRo: scalable hexapod robot for maintenance, repair, and operations. Robotics and Computer Integrated Manufacturing 30(5): 478-488.
- Tedeschi F, Carbone G (2017) Design of a novel leg-wheel hexapod walking robot. Robotics 6(40): doi:10.3390/robotics6040040.
- Lagaza K, Pandey A (2018) A literature review on motion planning of hexapod machines using different soft computing methods. Global Journal of Engineering. Science and Social Science Studies 3(1): 1-10.s
- Rong X, Li Y, Ruan J, Li B (2012) Design and simulation for a hydraulic actuated quadruped robot. Journal of Mechanical Science and Technology 26(4): 1171-1177.
- Burkus E, Odry P (2013) Mechanical and walking optimization of a hexapod robot using PSO. ICCC 2013-IEEE 9th International Conference on Computational Cybernetics, Proceedings 6617583: 177-180.
- Linnemann R, Klaassen B, Kirchner F (2001) Walking robot scorpion–experiences with a full parametric model. The European Simulation and Modelling Conference (ESM), June 6-9, 2001, Prague, Czech Republic.
- Guan X, Zheng H, Zhang X (2004) Biologically inspired quadruped robot biosbot: modeling, simulation and experiment. 2nd International Conference on Autonomous Robots and Agents, Palmerston North, New Zealand, p. 261-266.
- Chen W, Ren G, Zhang J, Wang J (2012) Smooth transition between different gaits of a hexapod robot via a central pattern generators algorithm. Journal of Intelligent & Robotic Systems 67(3-4): 255-270.
- Koo IM, Trong TD, Kang TH, Vo GL, Song YK, et al. (2007) Control of a quadruped walking robot based on biologically inspired approach. Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, pp. 2969-2974.
- Koo IM, Kang TH, Vo GL, Trong TD, Song YK, et al. (2009) Biologically inspired control of quadruped walking robot. International Journal of Control, Automation and Systems 7(4): 577-584.
- Grzelczyk D, Awrejcewicz J (2019) Dynamics, stability analysis and control of a mammal-like octopod robot driven by different central pattern generators. Journal of Computational Applied Mechanics, DOI:10.22059/JCAMECH.2019.278583.375.
- Grzelczyk D, Awrejcewicz J (2019) Modeling and control of an eight-legged walking robot driven by different gait generators. International Journal of Structural Stability and Dynamics 19(5): 1941009-1-1941009-23.
- Mahapatra A, Roy AA (2009) Computer aided dynamic simulation of six-legged robot. International Journal of Recent Trends in Engineering 2(2): 146-151.
- Cekus D, Kubik I, Piotrowski L, Skrobek D (2017) The application of SolidWorks to conduct advanced simulations of virtual prototypes. Engineering Modelling 63: 32-40.
- Ptak P, Pierzgalski M, Cekus D, Sokół K (2017) Modeling and stress analysis of a frame with a suspension of a Mars rover. Procedia Engineering 177: 175-181.
- Lewis MA, Bekey GA (2002) Gait adaptation in a quadruped robot. Autonomous Robots 12(3): 301-312.
- Pongas D, Mistry M, Schaal S (2007) A robust quadruped walking gait for traversing rough terrain. 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, pp. 1474-1479.
- Jin Bo, Chen Cheng, Li Wei, Li Xiangyun (2011) Design and configuration of a hexapod walking robot. Third International Conference on Measuring Technology and Mechatronics Automation, 6-7 January 2011, Shangshai, China, pp. 863-866.
- Lee YH, Tran DT, Hyun JH, Phan LT, Koo IM, et al (2015) A gait transition algorithm based on hybrid walking gait for a quadruped walking robot. Intelligent Service Robotics 8(4): 185-200.
- Chen G, Jin B, Chen Y (2017) Tripod gait-based turning gait of a six-legged walking robot. Journal of Mechanical Science and Technology 31(3): 1401-1411.
- Nandhini M, Krithika V, Chittal K (2017) Design of four pedal quadruped robot. IEEE International Conference on Power, Control, Signals and Instrumentation Engineering ICPCSI-2017, Chennai Tamil Nadu, India, pp. .2548-2552.
- Grzelczyk D, Szymanowska O, Awrejcewicz J (2018) Kinematic and dynamic simulation of an octopod robot controlled by different central pattern generators. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering 233(4): 400-417.















